- I developed statistical models and Kalman filtering techniques for real-world dynamical systems on 15 million rows of sensor data, resulting in 82% prediction accuracy. RSI, 2024.
- I built COSMOS, a realistic odor simulator using data-driven probabilistic methods for plume tracing and time-series generation. IEEE, 2025.
-
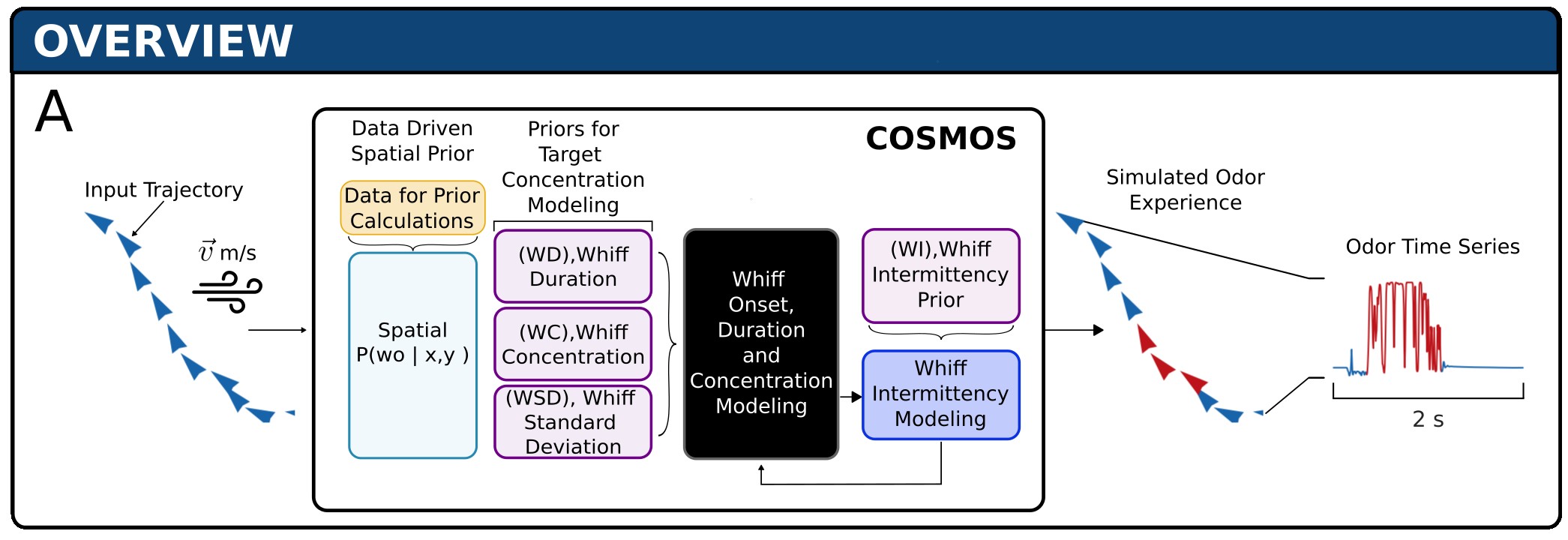
- I integrated COSMOS with a physics-enabled Gazebo simulation for UAV odor tracking under wind and gravity constraints.
Computational spatial biology, multiplex imaging, and quantitative tissue modeling.
I am a postdoctoral scholar at the University of Chicago specializing in spatial omics and high-dimensional multiplex imaging data. My work focuses on quantitative modeling of tissue architecture, cell neighborhoods, and immune microenvironment organization.
I build scalable analysis pipelines for cell segmentation, phenotyping, spatial network modeling, and inflammation trajectory analysis to uncover spatial biomarkers and disease-associated tissue states.
I am particularly interested in translating spatial data into mechanistic insights and therapeutic hypotheses in immunology and inflammatory disease. My Ph.D. research leveraged large noisy real-world datasets to develop predictive models using statistical analysis, machine learning, and deep learning methods.
Ph.D., Computer Science, University of Nevada, Reno
My doctoral work focused on predictive modeling from large noisy real-world datasets using statistical analysis, machine learning, and deep learning.
Selected work
A mix of current spatial biology work and earlier modeling research.
Spatial omics in inflammatory tissue
Quantitative analysis of tissue architecture, immune microenvironment organization, and inflammation trajectories in lupus and related disease contexts.
COSMOS simulator
A data-driven probabilistic simulator for chemical plumes across spatial scales, designed as a test bed for plume tracing algorithms and embodied sensing research.
IEEE publicationPrediction from real-world odor statistics
Statistical models and Kalman filtering approaches for large-scale outdoor plume data, improving prediction accuracy from noisy sensor measurements.
Journal of the Royal Society InterfaceUAV plume tracking in Gazebo
COSMOS was integrated with a physics-enabled robotics simulator to test odor tracking behavior under wind, gravity, and motion-control constraints.
Experience
A short path through the research and engineering work that shaped this site.
Postdoctoral Scholar, University of Chicago
Computational spatial biology focused on multiplex imaging, tissue architecture, cell neighborhoods, and immune microenvironment modeling.
Computer Science, University of Nevada, Reno
Developed predictive models from large noisy real-world datasets using statistical analysis, machine learning, deep learning, and physically grounded simulation.
Senior Research Engineer, ROS-Industrial Asia Pacific
Built industrial robotics applications spanning computer vision, autonomous navigation, machine learning, and virtual reality-enabled training systems.
Electrical Engineering, North Carolina State University
Worked on vision-guided collaborative robotics and motion planning for manufacturing systems using point cloud processing and computer vision.
Projects
Selected repositories and applied research tooling.
COSMOS
A probabilistic time-series simulator for chemical plumes across spatial scales.
Open repositorySingle-cell CAR T response modeling
Patient response modeling with Scanpy workflows, random forests, and convolutional neural networks.
Open repositoryGPTalkTerminal
A command-line assistant interface built around the ChatGPT API.
Open repositoryGemini YouTube Summarizer
A YouTube summarization tool powered by Google Gemini models.
Open repository